Прямоугольная (другие названия — плоская, двухмерная) система координат, названная по имени французского ученого Декарта (1596—1650) «декартовой системой координат на плоскости», образуется пересечением на плоскости под прямым углом (перпендикулярно) двух числовых осей так, что положительная полуось одной направлена вправо (ось x, или ось абсцисс), а второй — вверх (ось y, или ось ординат).
Точка пересечения осей совпадает с точкой 0 каждой из них и называется началом координат.
Для каждой из осей выбирается произвольный масштаб (единичный отрезок длины). Каждой точке плоскости соответствует одна пара чисел, названная координатами этой точки на плоскости. И наоборот, любой упорядоченной паре чисел соответствует одна точка плоскости, для которой эти числа являются координатами.
Первая координата точки называется абсциссой этой точки, а вторая координата — ординатой.
Вся плоскость координат делится на 4 квадранта (четверти). Квадранты расположены от первого до четвертого против часовой стрелки (см. рис.).
Чтобы определить координаты точки, нужно найти ее расстояние до оси абсцисс и оси ординат. Так как расстояние (кратчайшее) определяется по перпендикуляру, то из точки опускаются два перпендикуляра (вспомогательные линии на плоскости координат) на оси так, что точка их пересечения — это и есть место заданной точки в плоскости координат. Точки пересечения перпендикуляров с осями называются проекциями точки на оси координат.
Первый квадрант ограничен положительными полуосями абсцисс и ординат. Следовательно, координаты точек в этой четверти плоскости будут положительными
(знаки « + » и
Например, точка M (2; 4) на рисунке вверху.
Второй квадрант ограничен отрицательной полуосью абсцисс и положительной полуосью ординат. Следовательно, координаты точек по оси абсцисс будут отрицательными (знак «-»), а по оси ординат — положительными (знак « + »).
Например, точка C (-4; 1) на рисунке выше.
Третий квадрант ограничен отрицательной полуосью абсцисс и отрицательной полуосью ординат. Следовательно, координаты точек по оси абсцисс и оси ординат будут отрицательными (знаки «-» и «-»).
Например, точка D (-6; -2) на рисунке выше.
Четвертый квадрант ограничен положительной полуосью абсцисс и отрицательной полуосью ординат. Следовательно, координаты точек по оси абсцисс будут положительными (знак «+»). а по оси ординат - отрицательными (знак «-»).
Например, точка R (3; -3) на рисунке выше.
Построение точки по ее заданным координатам
первую координату точки найдем на оси абсцисс и проведем через нее вспомогательную линию — перпендикуляр;
вторую координату точки найдем на оси ординат и проведем через нее вспомогательную линию - перпендикуляр;
точка пересечения двух перпендикуляров (вспомогательных линий) и будет соответствовать точке с заданными координатами.
Определение положения точки в пространстве
Итак, положение какой-либо точки в пространстве может быть определено только по отношению к каким-либо другим точкам. Та точка, относительно которой рассматривается положение других точек, называется точкой отсчете . Мы так же применим и другое наименование точки отсчета – точка наблюдения . Обычно с точкой отсчета (или с точкой наблюдения) связывают какую-либо систему координат , которую и называют системой отсчета. В выбранной системе отсчета положение КАЖДОЙ точки определяется ТРЕМЯ координатами.
Правая декартова (или прямоугольная) система координат
Эта система координат представляет собой три взаимно перпендикулярных направленных прямых, называемых так же осями координат , пересекающихся в одной точке (начале координат). Точка начала координат обычно обозначается буквой О.
Оси координат носят названия:
1. Ось абсцисс – обозначается как OX;
2. Ось ординат – обозначается как OY;
3. Ось аппликат – обозначается как OZ

Теперь объясним, почему эта система координат называется правой. Давайте посмотрим на плоскость XOY с положительного направления оси OZ, например из точки А, как это показано на рисунке.

Предположим, что мы начинаем поворачивать ось OX вокруг точки О. Так вот – правая система координат имеет такое свойство, что, если смотреть на плоскость XOY из какой-либо точки положительной полуоси OZ (у нас – это точка А), то, при повороте оси OX на 90 против часовой стрелки, её положительное направление совпадет с положительным направлением оси OY.
Такое решение было принято в научном мире, нам же остается принимать это так, как оно есть.

Итак, после того, как мы определились с системой отсчета (в нашем случае – правой декартовой системой координат), положение любой точки описывается через значения её координат или другими словами – через величины проекций этой точки на оси координат.
Записывается это так: A(x, y, z), где x, y, z – и есть координаты точки А.

Прямоугольную систему координат можно представить себе, как линии пересечения трех взаимно перпендикулярных плоскостей.
Следует заметить, что ориентировать прямоугольную систему координат в пространстве можно как угодно, при этом надо выполнить только одно условие – начало координат должно совпадать с центром отсчета (или точкой наблюдения).

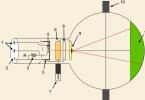
Сферическая система координат

Положение точки в пространстве можно описать и другим способом. Предположим, что мы выбрали область пространства, в котором располагается точка отсчета О (или точка наблюдения), и еще нам известно расстояние от точки отсчета до некоторой точки А. Соединим эти две точки прямой ОА. Эта прямая называется радиус-вектором и обозначается, как r . Все точки, имеющие одно и тоже значение радиус-вектора, лежат на сфере, центр которой находится в точке отсчета (или точке наблюдения), а радиус этой сферы равен, соответственно радиус-вектору.
Таким образом, нам становится очевидным, что знание величины радиус-вектора не дает нам однозначного ответа о положении интересующей нас точки. Нужны еще ДВЕ координаты, ведь для однозначного определения местоположения точки количество координат должно равняться ТРЕМ.
Далее мы поступим следующим образом – построим две взаимно перпендикулярные плоскости, которые, естественно, дадут линию пересечения, и эта линия будет бесконечной, потому как и сами плоскости ничем не ограничены. Зададим на этой линии точку и обозначим ее, ну например, как точка О1. А теперь совместим эту точку О1 с центром сферы – точкой О и посмотрим, что получается?

А получается очень интересная картина:
· Как одна, так и другая плоскости будут центральными плоскостями.
· Пересечение этих плоскостей с поверхностью сферы обозначат большие круги
· Один из этих кругов – произвольно, мы назовем ЭКВАТОРОМ , тогда другой круг будет называться ГЛАВНЫМ МЕРИДИАНОМ.
· Линия пересечения двух плоскостей однозначно определит направление ЛИНИИ ГЛАВНОГО МЕРИДИАНА.

Точки пересечения линии главного меридиана с поверхностью сферы обозначим, как М1 и М2

Через центр сферы точку О в плоскости главного меридиана проведем прямую, перпендикулярную линии главного меридиана. Эта прямая носит название ПОЛЯРНАЯ ОСЬ .
Полярная ось пересечет поверхность сферы в двух точках, которые называются ПОЛЮСАМИ СФЕРЫ. Обозначим эти точки, как Р1 и Р2.
Определение координат точки в пространстве
Теперь рассмотрим процесс определения координат точки в пространстве, а так же дадим наименования этим координатам. Для полноты картины, при определении положения точки, укажем основные направления, от которых производится отсчет координат, а так же положительное направление при отсчете.

1. Задаем положение в пространстве точки отсчета (или точки наблюдения). Обозначим эту точку буквой О.

2. Строим сферу, радиус которой равен длине радиус-вектора точки А. (Радиус-вектор точки А – это расстояние между точками О и А). Центр сферы располагается в точке отсчета О.

3. Задаем положение в пространстве плоскости ЭКВАТОРА, а соответственно плоскости ГЛАВНОГО МЕРИДИАНА. Следует напомнить, что эти плоскости взаимно перпендикулярны и являются центральными.
4. Пересечение этих плоскостей с поверхностью сферы определяет нам положение круга экватора, круга главного меридиана, а так же направление линии главного меридиана и полярной оси.
5. Определяем положение полюсов полярной оси и полюсов линии главного меридиана. (Полюса полярной оси – точки пересечение полярной оси с поверхностью сферы. Полюса линии главного меридиана – это точки пересечения линии главного меридиана с поверхностью сферы).

6. Через точку А и полярную ось строим плоскость, которую назовем плоскостью меридиана точки А. При пересечении этой плоскости с поверхностью сферы получится большой круг, который мы назовем МЕРИДИАНОМ точки А.
7. Меридиан точки А пересечет круг ЭКВАТОРА в некоторой точке, которую мы обозначим, как Е1
8. Положение точки Е1 на экваториальном круге определяется длиной дуги, заключенной между точками М1 и Е1. Отсчет ведется ПРОТИВ часовой стрелки. Дуга экваториального круга, заключенная между точками М1 и Е1 называется ДОЛГОТОЙ точки А. Долгота обозначается буквой .
Подведем промежуточный итог. На данный момент нам известны ДВЕ из ТРЕХ координат, описывающих положение точки А в пространстве – это радиус-вектор (r) и долгота (). Теперь мы будем определять третью координату. Эта координата определяется положением точки А на ее меридиане. Но вот положение начальной точки, от которой происходит отсчет, однозначно не определено: мы можем начинать отсчет как от полюса сферы (точка Р1), так и от точки Е1, то есть от точки пересечения линий меридиана точки А и экватора (или другими словами – от линии экватора).

В первом случае, положение точки А на меридиане называется ПОЛЯРНЫМ РАССТОЯНИЕМ (обозначается как р ) и определяется длиной дуги, заключенной между точкой Р1 (или точкой полюса сферы) и точкой А. Отсчет ведется вдоль линии меридиана от точки Р1 к точке А.

Во втором случае, когда отсчет ведется от линии экватора, положение точки А на линии меридиана называется ШИРОТОЙ (обозначается как и определяется длиной дуги, заключенной между точкой Е1 и точкой А.
Теперь мы можем окончательно сказать, что положение точки А в сферической системе координат определяется через:
· длину радиуса сферы (r),
· длину дуги долготы (),
· длину дуги полярного расстояния (р)
В этом случае координаты точки А запишутся следующим образом: А(r, , p)
Если пользоваться иной системой отсчета, то положение точки А в сферической системе координат определяется через:
· длину радиуса сферы (r),
· длину дуги долготы (),
· длину дуги широты ()
В этом случае координаты точки А запишутся следующим образом: А(r, , )
Способы измерения дуг
Возникает вопрос – как же нам измерить эти дуги? Самый простой и естественный способ – это провести непосредственное измерение длин дуг гибкой линейкой, и это возможно, если размеры сферы сравнимы с размерами человека. Но как поступить, если это условие не выполнимо?
В этом случае мы прибегнем к измерению ОТНОСИТЕЛЬНОЙ длины дуги. За эталон же мы примем длину окружности, частью которой является интересующая нас дуга. Как это можно сделать?
В пространстве, в которой положение точки может быть определено как её проекции на фиксированные прямые, пересекающиеся в одной точке, называемой началом координат. Эти проекции называются координатами точки, а прямые - осями координат.
В общем случае на плоскости декартова система координат (аффинная система координат) задаётся точкой О (началом координат) и упорядоченной парой приложенных к ней не лежащих на одной прямой векторов е 1 и е 2 (базисных векторов). Прямые, проходящие через начало координат в направлении базисных векторов, называют осями координат данной декартовой системы координат. Первая, определяемая вектором е 1 , называется осью абсцисс (или осью Ох), вторая - осью ординат (или осью Оу). Сама декартова система координат обозначается Ое 1 е 2 или Оху. Декартовыми координатами точки М (рисунок 1) в декартовой системе координат Oe 1 е 2 называется упорядоченная пара чисел (х, у), которые являются коэффициентами разложения вектора ОМ по базису {е 1 , е 2 }, то есть х и у таковы, что ОМ = хе 1 + уе 2 . Число х, -∞ < x < ∞, называется абсциссой, чис-ло у, - ∞ < у < ∞, - ординатой точки М. Если (x, у) - координаты точки М, то пишут М(х, у).
Если на плоскости введены две декартовы системы координат Oe 1 e 2 и 0’е’ 1 е’ 2 так, что векторы базиса {е’ 1 , е’ 2 } выражены через векторы базиса {e 1 ,е 2 } формулами
e’ 1 = a 11 e 1 + a 12 е 2 , е’ 2 = а 21 e 1 + a 22 e 2
и точка О’ имеет в декартовой системе координат Оe 1 e 2 координаты (х 0 , у 0), то координаты (х, у) точки М в декартовой системе координат Оe 1 e2 и координаты (х’, у’) той же точки в декартовой системе координат О’е 1 е’ 2 связаны соотношениями
х = а 11 х’ + а 21 у’ + х 0 , у = а 12 х’+ а 22 у’+ у 0 .
Декартову систему координат называют прямоугольной, если базис {е 1 , е 2 } ортонормированный, то есть векторы е 1 и е 2 взаимно перпендикулярны и имеют длины, равные единице (векторы е 1 и е 2 называют в этом случае ортами). В прямоугольной декартовой системе координат координаты х и у точки М суть величины ортогональных проекций точки М на оси Ох и Оу соответственно. В прямоугольной декартовой системе координат Оху расстояние между точками М 1 (х 1 , у 1) и М 2 (х 2 , у 2) равно √(х 2 -х 1) 2 + (y 2 -y 1) 2
Формулы перехода от одной прямоугольной декартовой системы координат Оху к другой прямоугольной декартовой системе координат О’х’у’, начало которой О’ декартовой системы координат Оху есть О’(х0, у0), имеют вид
х = х’cosα - у’sinα + х 0 , у = х’sin α + у’cosα + у 0
х = х’cosα + у’sinα + х 0 , у = х’sinα - у’cosα + у 0 .
В первом случае система О’х’у’ образуется поворотом базисных векторов е 1 ; е 2 на угол α и последующим переносом начала координат О в точку О’ (рисунок 2),

а во втором случае - поворотом базисных векторов е 1 , е 2 на угол α, последующим отражением оси, содержащей вектор е 2 относительно прямой, несущей вектор е 1 , и переносом начала координат О в точку О’ (рисунок 3).

Иногда используются косоугольные декартовы системы координат, отличающиеся от прямоугольной тем, что угол между единичными базисными векторами не является прямым.
Аналогично определяется общая декартова система координат (аффинная система координат) в пространстве: задаётся точка О - начало координат и упорядоченная тройка приложенных к ней не лежащих в одной плоскости векторов е 1 , е 2 , е 3 (базисных векторов). Как и в случае плоскости, определяются оси координат - ось абсцисс (ось Ох), ось ординат (ось Оу) и ось аппликат (ось Оz) (рисунок 4).

Декартова система координат в пространстве обозначается Oe 1 е 2 е 3 (или Oxyz). Плоскости, проходящие через пары осей координат, называются координатными плоскостями. Декартова система координат в пространстве называется правой, если поворот от оси Ох к оси Оу совершается в направлении, противоположном движению часовой стрелки, если смотреть на плоскость Оху из какой-нибудь точки положительной полуоси Оz, в противоположном случае декартова система координат называется левой. Если базисные векторы е 1 , е 2 , е 3 имеют длины, равные единице, и попарно перпендикулярны, то декартова система координат называется прямоугольной. Положение одной прямоугольной декартовой системы координат в пространстве относительно другой прямоугольной декартовой системы координат с той же ориентацией определяется тремя эйлеровыми углами.
Декартова система координат названа по имени Р. Декарта, хотя в его сочинении «Геометрия» (1637) рассматривалась косоугольная система координат, в которой координаты точек могли быть только положительными. В издании 1659-61 годов к «Геометрии» приложена работа голландского математика И. Гудде, в которой впервые допускаются как положительные, так и отрицательные значения координат. Пространственную декартову систему координат ввёл французский математик Ф. Лаир (1679). В начале18 века установились обозначения х, у, z для декартовых координат.
Упорядоченная система двух или трёх пересекающихся перпендикулярных друг другу осей с общим началом отсчёта (началом координат) и общей единицей длины называется прямоугольной декартовой системой координат .
Общая декартова система координат (аффинная система координат ) может включать и не обязательно перпендикулярные оси. В честь французского математика Рене Декарта (1596-1662) названа именно такая система координат, в которой на всех осях отсчитывается общая единица длины и оси являются прямыми.
Прямоугольная декартова система координат на плоскости имеет две оси, а прямоугольная декартова система координат в пространстве - три оси. Каждая точка на плоскости или в пространстве определяется упорядоченным набором координат - чисел в соответствии единице длины системы координат.
Заметим, что, как следует из определения, существует декартова система координат и на прямой, то есть в одном измерении. Введение декартовых координат на прямой представляет собой один из способов, с помощью которого любой точке прямой ставится в соответствие вполне определённое вещественное число, то есть координата.
Метод координат, возникший в работах Рене Декарта, ознаменовал собой революционную перестройку всей математики. Появилась возможность истолковывать алгебраические уравнения (или неравенства) в виде геометрических образов (графиков) и, наоборот, искать решение геометрических задач с помощью аналитических формул, систем уравнений. Так, неравенство z < 3 геометрически означает полупространство, лежащее ниже плоскости, параллельной координатной плоскости xOy и находящейся выше этой плоскости на 3 единицы.
С помощью декартовой системы координат принадлежность точки заданной кривой соответствует тому, что числа x и y удовлетворяют некоторому уравнению. Так, координаты точки окружности с центром в заданной точке (a ; b ) удовлетворяют уравнению (x - a )² + (y - b )² = R ² .
Прямоугольная декартова система координат на плоскости
Две перпендикулярные оси на плоскости с общим началом и одинаковой масштабной единицей образуют декартову прямоугольную систему координат на плоскости . Одна из этих осей называется осью Ox , или осью абсцисс , другую - осью Oy , или осью ординат . Эти оси называются также координатными осями. Обозначим через M x и M y соответственно проекции произвольной точки М на оси Ox и Oy . Как получить проекции? Проведём через точку М Ox . Эта прямая пересекает ось Ox в точке M x . Проведём через точку М прямую, перпендикулярную оси Oy . Эта прямая пересекает ось Oy в точке M y . Это показано на рисунке ниже.
x и y точки М будем называть соответственно величины направленных отрезков OM x и OM y . Величины этих направленных отрезков рассчитываются соответственно как x = x 0 - 0 и y = y 0 - 0 . Декартовы координаты x и y точки М абсциссой и ординатой . Тот факт, что точка М имеет координаты x и y , обозначается так: M (x , y ) .
Координатные оси разбивают плоскость на четыре квадранта , нумерация которых показана на рисунке ниже. На нём же указана расстановка знаков координат точек в зависимости от их расположения в том или ином квадранте.
Помимо декартовых прямоугольных координат на плоскости часто рассматривается также полярная система координат. О способе перехода от одной системы координат к другой - в уроке полярная система координат .

Прямоугольная декартова система координат в пространстве
Декартовы координаты в пространстве вводятся в полной аналогии с декартовыми координатами на плоскости.
Три взаимно перпендикулярные оси в пространстве (координатные оси) с общим началом O и одинаковой масштабной единицей образуют декартову прямоугольную систему координат в пространстве .
Одну из указанных осей называют осью Ox , или осью абсцисс , другую - осью Oy , или осью ординат , третью - осью Oz , или осью аппликат . Пусть M x , M y M z - проекции произвольной точки М пространства на оси Ox , Oy и Oz соответственно.
Проведём через точку М Ox Ox в точке M x . Проведём через точку М плоскость, перпендикулярную оси Oy . Эта плоскость пересекает ось Oy в точке M y . Проведём через точку М плоскость, перпендикулярную оси Oz . Эта плоскость пересекает ось Oz в точке M z .

Декартовыми прямоугольными координатами x , y и z точки М будем называть соответственно величины направленных отрезков OM x , OM y и OM z . Величины этих направленных отрезков рассчитываются соответственно как x = x 0 - 0 , y = y 0 - 0 и z = z 0 - 0 .
Декартовы координаты x , y и z точки М называются соответственно её абсциссой , ординатой и аппликатой .
Попарно взятые координатные оси располагаются в координатных плоскостях xOy , yOz и zOx .
Задачи о точках в декартовой системе координат
Пример 1.
A (2; -3) ;
B (3; -1) ;
C (-5; 1) .
Найти координаты проекций этих точек на ось абсцисс.
Решение. Как следует из теоретической части этого урока, проекция точки на ось абсцисс расположена на самой оси абсцисс, то есть оси Ox , а следовательно имеет абсциссу, равную абсциссе самой точки, и ординату (координату на оси Oy , которую ось абсцисс пересекает в точке 0), равную нулю. Итак получаем следующие координаты данных точек на ось абсцисс:
A x (2; 0) ;
B x (3; 0) ;
C x (-5; 0) .
Пример 2. В декартовой системе координат на плоскости даны точки
A (-3; 2) ;
B (-5; 1) ;
C (3; -2) .
Найти координаты проекций этих точек на ось ординат.
Решение. Как следует из теоретической части этого урока, проекция точки на ось ординат расположена на самой оси ординат, то есть оси Oy , а следовательно имеет ординату, равную ординате самой точки, и абсциссу (координату на оси Ox , которую ось ординат пересекает в точке 0), равную нулю. Итак получаем следующие координаты данных точек на ось ординат:
A y (0; 2) ;
B y (0; 1) ;
C y (0; -2) .
Пример 3. В декартовой системе координат на плоскости даны точки
A (2; 3) ;
B (-3; 2) ;
C (-1; -1) .
Ox .
Ox Ox Ox , будет иметь такую же абсциссу, что и данная точка, и ординату, равную по абсолютной величине ординате данной точки, и противоположную ей по знаку. Итак получаем следующие координаты точек, симметричных этим точкам относительно оси Ox :
A" (2; -3) ;
B" (-3; -2) ;
C" (-1; 1) .
Решить задачи на декартову систему координат самостоятельно, а затем посмотреть решения
Пример 4. Определить, в каких квадрантах (четвертях, рисунок с квадрантами - в конце параграфа "Прямоугольная декартова система координат на плоскости") может быть расположена точка M (x ; y ) , если
1) xy > 0 ;
2) xy < 0 ;
3) x − y = 0 ;
4) x + y = 0 ;
5) x + y > 0 ;
6) x + y < 0 ;
7) x − y > 0 ;
8) x − y < 0 .
Пример 5. В декартовой системе координат на плоскости даны точки
A (-2; 5) ;
B (3; -5) ;
C (a ; b ) .
Найти координаты точек, симметричных этим точкам относительно оси Oy .
Продолжаем решать задачи вместе
Пример 6. В декартовой системе координат на плоскости даны точки
A (-1; 2) ;
B (3; -1) ;
C (-2; -2) .
Найти координаты точек, симметричных этим точкам относительно оси Oy .
Решение. Поворачиваем на 180 градусов вокруг оси Oy направленный отрезок, идущий от оси Oy до данной точки. На рисунке, где обозначены квадранты плоскости, видим, что точка, симметричная данной относительно оси Oy , будет иметь такую же ординату, что и данная точка, и абсциссу, равную по абсолютной величине абсциссе данной точки, и противоположную ей по знаку. Итак получаем следующие координаты точек, симметричных этим точкам относительно оси Oy :
A" (1; 2) ;
B" (-3; -1) ;
C" (2; -2) .
Пример 7. В декартовой системе координат на плоскости даны точки
A (3; 3) ;
B (2; -4) ;
C (-2; 1) .
Найти координаты точек, симметричных этим точкам относительно начала координат.
Решение. Поворачиваем на 180 градусов вокруг начала координат направленный отрезок, идущий от начала координат к данной точке. На рисунке, где обозначены квадранты плоскости, видим, что точка, симметричная данной относительно начала координат, будет иметь абсциссу и ординату, равные по абсолютной величине абсциссе и ординате данной точки, но противоположные им по знаку. Итак получаем следующие координаты точек, симметричных этим точкам относительно начала координат:
A" (-3; -3) ;
B" (-2; 4) ;
C (2; -1) .
Пример 8.
A (4; 3; 5) ;
B (-3; 2; 1) ;
C (2; -3; 0) .
Найти координаты проекций этих точек:
1) на плоскость Oxy ;
2) на плоскость Oxz ;
3) на плоскость Oyz ;
4) на ось абсцисс;
5) на ось ординат;
6) на ось апликат.
1) Проекция точки на плоскость Oxy расположена на самой этой плоскости, а следовательно имеет абсциссу и ординату, равные абсциссе и ординате данной точки, и апликату, равную нулю. Итак получаем следующие координаты проекций данных точек на Oxy :
A xy (4; 3; 0) ;
B xy (-3; 2; 0) ;
C xy (2; -3; 0) .
2) Проекция точки на плоскость Oxz расположена на самой этой плоскости, а следовательно имеет абсциссу и апликату, равные абсциссе и апликате данной точки, и ординату, равную нулю. Итак получаем следующие координаты проекций данных точек на Oxz :
A xz (4; 0; 5) ;
B xz (-3; 0; 1) ;
C xz (2; 0; 0) .
3) Проекция точки на плоскость Oyz расположена на самой этой плоскости, а следовательно имеет ординату и апликату, равные ординате и апликате данной точки, и абсциссу, равную нулю. Итак получаем следующие координаты проекций данных точек на Oyz :
A yz (0; 3; 5) ;
B yz (0; 2; 1) ;
C yz (0; -3; 0) .
4) Как следует из теоретической части этого урока, проекция точки на ось абсцисс расположена на самой оси абсцисс, то есть оси Ox , а следовательно имеет абсциссу, равную абсциссе самой точки, а ордината и апликата проекции равны нулю (поскольку оси ординат и апликат пересекают ось абсцисс в точке 0). Получаем следующие координаты проекций данных точек на ось абсцисс:
A x (4; 0; 0) ;
B x (-3; 0; 0) ;
C x (2; 0; 0) .
5) Проекция точки на ось ординат расположена на самой оси ординат, то есть оси Oy , а следовательно имеет ординату, равную ординате самой точки, а абсцисса и апликата проекции равны нулю (поскольку оси абсцисс и апликат пересекают ось ординат в точке 0). Получаем следующие координаты проекций данных точек на ось ординат:
A y (0; 3; 0) ;
B y (0; 2; 0) ;
C y (0; -3; 0) .
6) Проекция точки на ось апликат расположена на самой оси апликат, то есть оси Oz , а следовательно имеет апликату, равную апликате самой точки, а абсцисса и ордината проекции равны нулю (поскольку оси абсцисс и ординат пересекают ось апликат в точке 0). Получаем следующие координаты проекций данных точек на ось апликат:
A z (0; 0; 5) ;
B z (0; 0; 1) ;
C z (0; 0; 0) .
Пример 9. В декартовой системе координат в пространстве даны точки
A (2; 3; 1) ;
B (5; -3; 2) ;
C (-3; 2; -1) .
Найти координаты точек, симметричных этим точкам относительно:
1) плоскости Oxy ;
2) плоскости Oxz ;
3) плоскости Oyz ;
4) оси абсцисс;
5) оси ординат;
6) оси апликат;
7) начала координат.
1) "Продвигаем" точку по другую сторону оси Oxy Oxy , будет иметь абсциссу и ординату, равные абсциссе и ординате данной точки, и апликату, равную по величине апликате данной точки, но противоположную ей по знаку. Итак, получаем следующие координаты точек, симметричных данным относительно плоскости Oxy :
A" (2; 3; -1) ;
B" (5; -3; -2) ;
C" (-3; 2; 1) .
2) "Продвигаем" точку по другую сторону оси Oxz на то же расстояние. По рисунку, отображающему координатное пространство, видим, что точка, симметричная данной относительно оси Oxz , будет иметь абсциссу и апликату, равные абсциссе и апликате данной точки, и ординату, равную по величине ординате данной точки, но противоположную ей по знаку. Итак, получаем следующие координаты точек, симметричных данным относительно плоскости Oxz :
A" (2; -3; 1) ;
B" (5; 3; 2) ;
C" (-3; -2; -1) .
3) "Продвигаем" точку по другую сторону оси Oyz на то же расстояние. По рисунку, отображающему координатное пространство, видим, что точка, симметричная данной относительно оси Oyz , будет иметь ординату и апликату, равные ординате и апликате данной точки, и абсциссу, равную по величине абсциссе данной точки, но противоположную ей по знаку. Итак, получаем следующие координаты точек, симметричных данным относительно плоскости Oyz :
A" (-2; 3; 1) ;
B" (-5; -3; 2) ;
C" (3; 2; -1) .
По аналогии с симметричными точками на плоскости и точками пространства, симметричными данным относительно плоскостей, замечаем, что в случае симметрии относительно некоторой оси декартовой системы координат в пространстве, координата на оси, относительно которой задана симметрия, сохранит свой знак, а координаты на двух других осях будут теми же по абсолютной величине, что и координаты данной точки, но противоположными по знаку.
4) Свой знак сохранит абсцисса, а ордината и апликата поменяют знаки. Итак, получаем следующие координаты точек, симметричных данным относительно оси абсцисс:
A" (2; -3; -1) ;
B" (5; 3; -2) ;
C" (-3; -2; 1) .
5) Свой знак сохранит ордината, а абсцисса и апликата поменяют знаки. Итак, получаем следующие координаты точек, симметричных данным относительно оси ординат:
A" (-2; 3; -1) ;
B" (-5; -3; -2) ;
C" (3; 2; 1) .
6) Свой знак сохранит апликата, а абсцисса и ордината поменяют знаки. Итак, получаем следующие координаты точек, симметричных данным относительно оси апликат:
A" (-2; -3; 1) ;
B" (-5; 3; 2) ;
C" (3; -2; -1) .
7) По аналогии с симметрии в случае с точками на плоскости, в случае симметрии относительно начала координат все координаты точки, симметричной данной, будут равными по абсолютной величине координатам данной точки, но противоположными им по знаку. Итак, получаем следующие координаты точек, симметричных данным относительно начала координат.
Если через точку О в про-стран-стве мы про-ве-дем три пер-пен-ди-ку-ляр-ные пря-мые, на-зо-вем их, вы-бе-рем на-прав-ле-ние, обо-зна-чим еди-нич-ные от-рез-ки, то мы по-лу-чим пря-мо-уголь-ную си-сте-му ко-ор-ди-нат в про-стран-стве . Оси ко-ор-ди-нат на-зы-ва-ют-ся так: Ох - ось абс-цисс, Оy - ось ор-ди-нат и Оz - ось ап-пли-кат . Вся си-сте-ма ко-ор-ди-нат обо-зна-ча-ет-ся - Oxyz. Таким об-ра-зом, по-яв-ля-ют-ся три ко-ор-ди-нат-ные плос-ко-сти : Оxy, Оxz, Оyz.
При-ве-дем при-мер по-стро-е-ния точки В(4;3;5) в пря-мо-уголь-ной си-сте-ме ко-ор-ди-нат (см. Рис. 1).
Рис. 1. По-стро-е-ние точки B в про-стран-стве
Пер-вая ко-ор-ди-на-та точки B - 4, по-это-му от-кла-ды-ва-ем на Ox 4, про-во-дим пря-мую па-рал-лель-но оси Oy до пе-ре-се-че-ния с пря-мой, про-хо-дя-щей через у=3. Таким об-ра-зом, мы по-лу-ча-ем точку K. Эта точка лежит в плос-ко-сти Oxy и имеет ко-ор-ди-на-ты K(4;3;0). Те-перь нужно про-ве-сти пря-мую па-рал-лель-но оси Oz. И пря-мую, ко-то-рая про-хо-дит через точку с ап-пли-ка-той 5 и па-рал-лель-на диа-го-на-ли па-рал-ле-ло-грам-ма в плос-ко-сти Oxy. На их пе-ре-се-че-нии мы по-лу-чим ис-ко-мую точку B.
Рас-смот-рим рас-по-ло-же-ние точек, у ко-то-рых одна или две ко-ор-ди-на-ты равны 0 (см. Рис. 2).

На-при-мер, точка A(3;-1;0). Нужно про-дол-жить ось Oy влево до зна-че-ния -1, найти точку 3 на оси Ox, и на пе-ре-се-че-нии линий, про-хо-дя-щих через эти зна-че-ния, по-лу-ча-ем точку А. Эта точка имеет ап-пли-ка-ту 0, а зна-чит, она лежит в плос-ко-сти Oxy.
Точка C(0;2;0) имеет абс-цис-су и ап-пли-ка-ту 0 - не от-ме-ча-ем. Ор-ди-на-та равна 2, зна-чит точка C лежит толь-ко на оси Oy, ко-то-рая яв-ля-ет-ся пе-ре-се-че-ни-ем плос-ко-стей Oxy и Oyz.
Чтобы от-ло-жить точку D(-4;0;3) про-дол-жа-ем ось Ox назад за на-ча-ло ко-ор-ди-нат до точки -4. Те-перь вос-ста-нав-ли-ва-ем из этой точки пер-пен-ди-ку-ляр - пря-мую, па-рал-лель-ную оси Oz до пе-ре-се-че-ния с пря-мой, па-рал-лель-ной оси Ox и про-хо-дя-щей через зна-че-ние 3 на оси Oz. По-лу-ча-ем току D(-4;0;3). Так как ор-ди-на-та точки равна 0, зна-чит точка D лежит в плос-ко-сти Oxz.
Сле-ду-ю-щая точка E(0;5;-3). Ор-ди-на-та точки 5, ап-пли-ка-та -3, про-во-дим пря-мые про-хо-дя-щие через эти зна-че-ния на со-от-вет-ству-ю-щих осях, и на их пе-ре-се-че-нии по-лу-ча-ем точку E(0;5;-3). Эта точка имеет первую ко-ор-ди-на-ту 0, зна-чит она лежит в плос-ко-сти Oyz.
2. Координаты вектора
На-чер-тим пря-мо-уголь-ную си-сте-му ко-ор-ди-нат в про-стран-стве Oxyz. За-да-дим в про-стран-стве пря-мо-уголь-ную си-сте-му ко-ор-ди-нат Oxyz. На каж-дой из по-ло-жи-тель-ных по-лу-осей от-ло-жим от на-ча-ла ко-ор-ди-нат еди-нич-ный век-тор, т. е. век-тор, длина ко-то-ро-го равна еди-ни-це. Обо-зна-чим еди-нич-ный век-тор оси абс-цисс, еди-нич-ный век-тор оси ор-ди-нат , и еди-нич-ный век-тор оси ап-пли-кат (см. рис. 1). Эти век-то-ры со-на-прав-ле-ны с на-прав-ле-ни-я-ми осей, имеют еди-нич-ную длину и ор-то-го-наль-ны - по-пар-но пер-пен-ди-ку-ляр-ны. Такие век-то-ра на-зы-ва-ют ко-ор-ди-нат-ны-ми век-то-ра-ми или ба-зи-сом.

Рис. 1. Раз-ло-же-ние век-то-ра по трем ко-ор-ди-нат-ным век-то-рам
Возь-мем век-тор , по-ме-стим его в на-ча-ло ко-ор-ди-нат, и раз-ло-жим этот век-тор по трем неком-пла-нар-ным - ле-жа-щим в раз-ных плос-ко-стях - век-то-рам. Для этого опу-стим про-ек-цию точки M на плос-кость Oxy, и най-дем ко-ор-ди-на-ты век-то-ров , и . По-лу-ча-ем: . Рас-смот-рим по от-дель-но-сти каж-дый из этих век-то-ров. Век-тор лежит на оси Ox, зна-чит, со-глас-но свой-ству умно-же-ния век-то-ра на число, его можно пред-ста-вить как ка-кое-то число x умно-жен-ное на ко-ор-ди-нат-ный век-тор . , а длина век-то-ра ровно в x раз боль-ше длины . Так же по-сту-пим и с век-то-ра-ми и , и по-лу-ча-ем раз-ло-же-ние век-то-ра по трем ко-ор-ди-нат-ным век-то-рам:
Ко-эф-фи-ци-ен-ты этого раз-ло-же-ния x, y и z на-зы-ва-ют-ся ко-ор-ди-на-та-ми век-то-ра в про-стран-стве.
Рас-смот-рим пра-ви-ла, ко-то-рые поз-во-ля-ют по ко-ор-ди-на-там дан-ных век-то-ров найти ко-ор-ди-на-ты их суммы и раз-но-сти, а также ко-ор-ди-на-ты про-из-ве-де-ния дан-но-го век-то-ра на дан-ное число.
1) Сло-же-ние:
2) Вы-чи-та-ние:
3) Умно-же-ние на число: ![]() ,
,
Век-тор, на-ча-ло ко-то-ро-го сов-па-да-ет с на-ча-лом ко-ор-ди-нат, на-зы-ва-ет-ся ра-ди-ус -век-то-ром. (Рис. 2). Век-тор - ра-ди-ус-век-тор, где x, y и z - это ко-эф-фи-ци-ен-ты раз-ло-же-ния этого век-то-ра по ко-ор-ди-нат-ным век-то-рам , , . В дан-ном слу-чае x - это пер-вая ко-ор-ди-на-та точки A на оси Ox, y - ко-ор-ди-на-та точки B на оси Oy, z - ко-ор-ди-на-та точки C на оси Oz. По ри-сун-ку видно, что ко-ор-ди-на-ты ра-ди-ус-век-то-ра од-но-вре-мен-но яв-ля-ют-ся ко-ор-ди-на-та-ми точки М.

Возь-мем точку A(x1;y1;z1) и точку B(x2;y2;z2) (см. рис. 3). Пред-ста-вим век-тор как раз-ность век-то-ров и по свой-ству век-то-ров. При-чем, и - ра-ди-ус-век-то-ры, и их ко-ор-ди-на-ты сов-па-да-ют с ко-ор-ди-на-та-ми кон-цов этих век-то-ров. Тогда мы можем пред-ста-вить ко-ор-ди-на-ты век-то-ра как раз-ность со-от-вет-ству-ю-щих ко-ор-ди-нат век-то-ров и : . Таким об-ра-зом, ко-ор-ди-на-ты век-то-ра мы можем вы-ра-зить через ко-ор-ди-на-ты конца и на-ча-ла век-то-ра.

Рас-смот-рим при-ме-ры, ил-лю-стри-ру-ю-щие свой-ства век-то-ров и их вы-ра-же-ние через ко-ор-ди-на-ты. Возь-мем век-то-ры , , . Нас спра-ши-ва-ют век-тор . В дан-ном слу-чае найти это зна-чит найти ко-ор-ди-на-ты век-то-ра, ко-то-рые пол-но-стью его опре-де-ля-ют. Под-став-ля-ем в вы-ра-же-ние вме-сто век-то-ров со-от-вет-ствен-но их ко-ор-ди-на-ты. По-лу-ча-ем:
Те-перь умно-жа-ем число 3 на каж-дую ко-ор-ди-на-ту в скоб-ках, и то же самое де-ла-ем с 2:
У нас по-лу-чи-лась сумма трех век-то-ров, скла-ды-ва-ем их по изу-чен-но-му выше свой-ству:

Ответ: ![]()
При-мер №2.
Дано: Тре-уголь-ная пи-ра-ми-да AOBC (см. рис. 4). Плос-ко-сти AOB, AOC и OCB - по-пар-но пер-пен-ди-ку-ляр-ны. OA=3, OB=7, OC=4; M - сер.AC; N - сер.OC; P - сер. CB.
Найти: ,,,,,,,.

Ре-ше-ние: Вве-дем пря-мо-уголь-ную си-сте-му ко-ор-ди-нат Oxyz с на-ча-лом от-сче-та в точке O. По усло-вию обо-зна-ча-ем точки A, B и C на осях и се-ре-ди-ны ребер пи-ра-ми-ды - M, P и N. По ри-сун-ку на-хо-дим ко-ор-ди-на-ты вер-шин пи-ра-ми-ды: A(3;0;0), B(0;7;0), C(0;0;4).